CAR: Cross-Vehicle Kinodynamics Adaptation via Mobility Representation
 CAR
CARAbstract
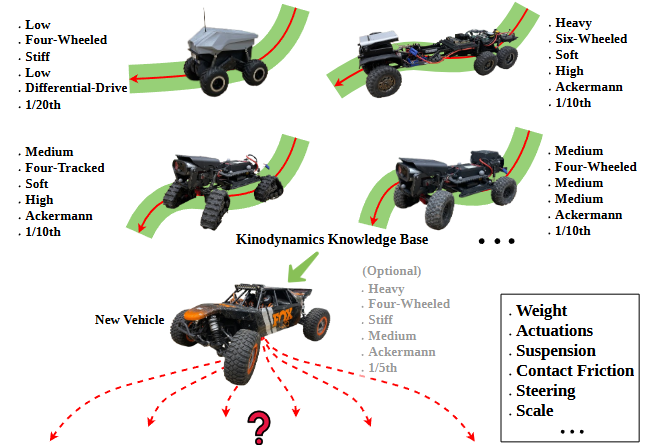
Developing autonomous off-road mobility typically requires either extensive, platform-specific data collection or relies on simplified abstractions, such as unicycle or bicycle models, that fail to capture the complex kinodynamics of diverse platforms, ranging from wheeled to tracked vehicles. This limitation hinders scalability across evolving heterogeneous autonomous robot fleets. To address this challenge, we propose Cross-vehicle kinodynamics Adaptation via mobility Representation (CAR), a novel framework that enables rapid mobility transfer to new vehicles. CAR employs a Transformer encoder with Adaptive Layer Normalization to embed vehicle trajectory transitions and physical configurations into a shared mobility latent space. By identifying and extracting commonality from nearest neighbors within this latent space, our approach enables rapid kinodynamics adaptation to novel platforms with minimal data collection and computational overhead. We evaluate CAR using the Verti-Bench simulator, built on the Chrono multi-physics engine, and validate its performance on four distinct physical configurations of the Verti-4-Wheeler platform. With only one minute of new trajectory data, CAR achieves up to 67.2% reduction in prediction error compared to direct neighbor transfer across diverse unseen vehicle configurations, demonstrating the effectiveness of cross-vehicle mobility knowledge transfer in both simulated and real-world environments.